2015年3月16日、米国カリフォルニア大学バークレー校とシンガポール南洋理工大学は共同で、昆虫の“操縦”に関する新たな技術を公表した。これは、空中を飛ぶ甲虫をリモートコントロールするものだ。

米国カリフォルニア大学バークレー校とシンガポール南洋理工大学が、
昆虫の“操縦”に関する新たな技術を公表
(Photo by Tat Thang Vo Doan and Hirotaka Sato/NTU Singapore)
昆虫の“操縦”に関する新たな技術を公表
(Photo by Tat Thang Vo Doan and Hirotaka Sato/NTU Singapore)
両大学による研究チームは、ハナムグリの背中に“バックパック”を取り付け、その飛行方法を検証。これまでは不明な点も多かった昆虫の飛翔筋などの機能について解明した。その結果を応用して昆虫の飛行をリモートからコントロール可能にし、災害時の被災者捜索などに役立てようとしている。

“バックパック”を取り付けられたハナムグリ
(Photo by Tat Thang Vo Doan and Hirotaka Sato/NTU Singapore)
(Photo by Tat Thang Vo Doan and Hirotaka Sato/NTU Singapore)
ハナムグリの背中に取り付けられた“バックパック”は、マイクロコントローラー、無線の送受信機、そして3.9ボルトのリチウムイオンバッテリーで構成されている。マイクロコントローラーからは6つの電極が出ており、ハナムグリの視葉や飛翔筋を刺激。飛行、左右への旋回、そして空中停止をコントロール可能にする。
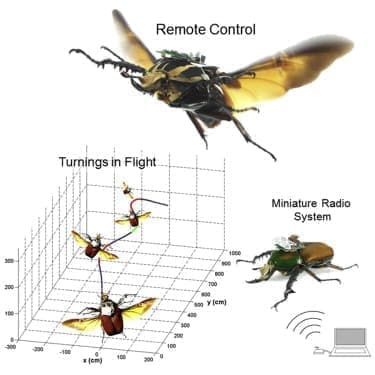
ハナムグリをコントロールする仕組み
コントローラーはハナムグリの神経筋のデータを無線でコンピューターに送信。今後の研究に役立てるという。飛行する昆虫をより正確にコントロール可能にすることで、ゴキブリのように地面を這って移動する昆虫と比較して、被災地などでの捜索活動をより素早く実施できると考えられる。
研究をカリフォルニア大学バークレー校でこの研究を開始し、現在は南洋理工大学で研究を続けている Hirotaka Sato さんは、この技術の可能性について次のように述べている。
「小さなマイクや温度センサーなどを搭載し、救難目的に応用するのは容易だろう。この技術があれば、倒壊した建物内の狭い空間や割れ目など、これまで人が入り込めなかった場所を安全に探索できるようになる」

 186
186